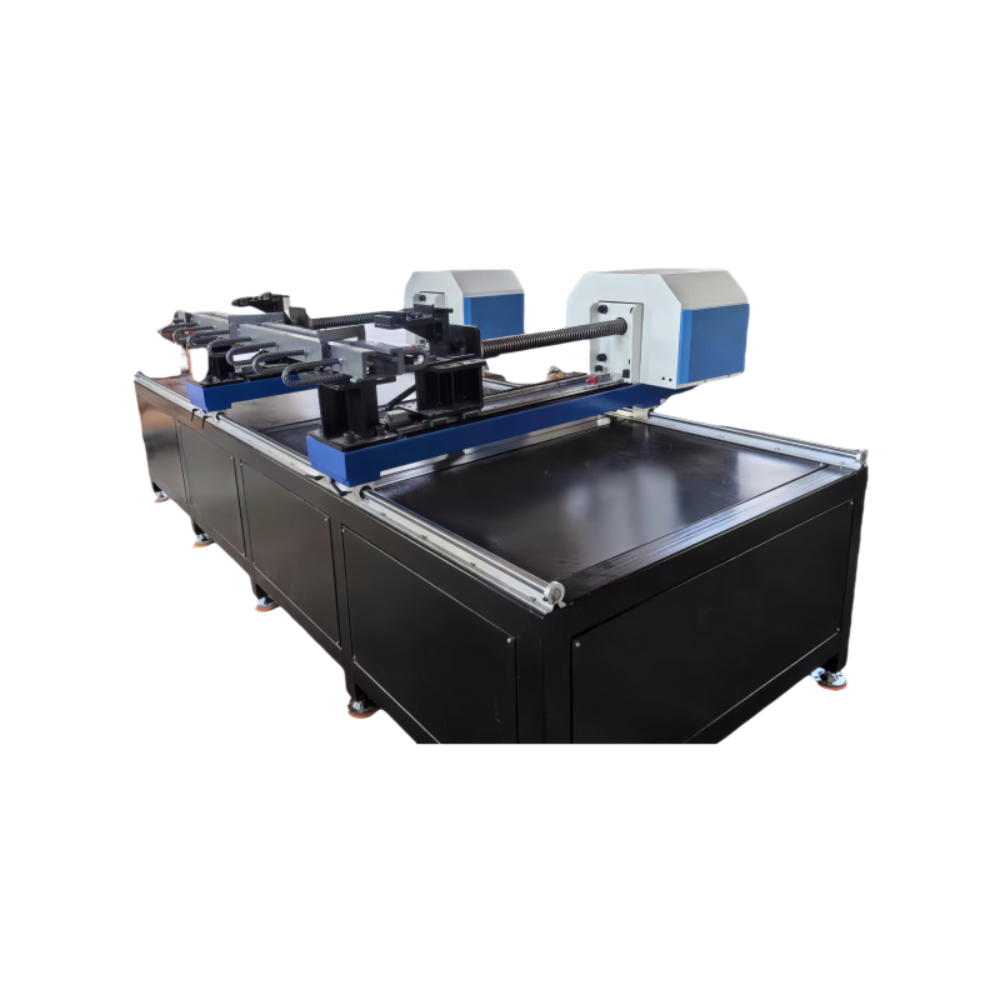
1.??? 試驗裝置采用鋼制型材搭建����,立柱采用槽鋼形式�,兩側采用方形支梁,增加強度��。
2.??? 設備供電采用三相五線制�,并可靠接地,確保安全供電��。
3.??? 角度測量采用角度傳感器進行測量����,力值采用拉力傳感器進行測量,位移量采用拉線式位移傳感器進行測量����。
4.??? 傳感器接線安裝采用分線盒形式,并通過航插引至控制系統(tǒng)��。
5.??? 傳感器數(shù)據(jù)通過12位精度模塊進行處理�����,確保采集數(shù)據(jù)精確��、不失真�,系統(tǒng)處理速度可達100Hz。
6.??? 系統(tǒng)所用傳感器信號均采用4-20mA輸出�����,并用屏蔽線進行連接����。
7.??? 控制系統(tǒng)實時顯示測試參數(shù),并且能夠自動采集計算測試結果���。
8.??? 人機界面可同時顯示3組測試數(shù)據(jù)����,并自動計算測試結果�����。
9.??? 系統(tǒng)可修正并儲存?zhèn)鞲衅髁砍碳傲泓c�,已便校準傳感器。
10. 電氣控制采用獨立的控制柜�����,遠離操作部,防止對操作人員的傷害����。
11. 電氣柜配備必要的按鈕和緊急停止按鈕。
12. 控制柜內(nèi)設用短路��、過載����、過熱等保護,以保護電機及系統(tǒng)��。
13. 控制手柄采用直流24V來間接控制電機升降��,確保操作安全�����。
14. 控制試驗筐的升降均采用點動控制模式����,便于精準定位且安全可靠。
15. 操作部位配備防護欄���,防護欄為為網(wǎng)狀形式�,四邊有立柱,一側開門�����,方便操作��,支柱采用可移動式結構��,方便安裝�����。
16. 采用手動脫鉤裝置進行脫鉤��,脫鉤裝置額定拉力3噸��,脫鉤機構帶自鎖功能���,采用鋼絲繩遠端進行拉拽脫鉤,整個脫鉤裝置采用省力結構�,操作簡單。
17. 試驗筐上下滑動采用U型輪和圓形導軌進行導向��,上下滑動順暢,阻力小�����。
18. 試驗筐上升至極限位置有限位保護�����?���?赏ㄟ^外接手柄或者界面按鈕雙重控制試驗筐的上升和下降。
19. 鎖繩角度試驗采用安全鎖擺臂傾斜的方式進行測量��。
20. 自由墜落測試系統(tǒng)可自動測算出載荷系數(shù)�。